|
|

|

|
| e-Pub |
Section: Research Program
Cyber Physical Systems
The development of complex embedded systems platforms requires putting together many hardware components, processor cores, application specific co-processors, bus architectures, peripherals, etc. The hardware platform of a project is seldom entirely new. In fact, in most cases, 80 percent of the hardware components are re-used from previous projects or simply are COTS (Commercial Off-The-Shelf) components. There is no need to simulate in great detail these already proven components, whereas there is a need to run fast simulation of the software using these components.
These requirements call for an integrated, modular simulation environment where already proven components can be simulated quickly, (possibly including real hardware in the loop), new components under design can be tested more thoroughly, and the software can be tested on the complete platform with reasonable speed.
Modularity and fast prototyping also have become important aspects of simulation frameworks, for investigating alternative designs with easier re-use and integration of third party components. The project aims at developing such a rapid prototyping, modular simulation platform, combining new hardware components modeling, verification techniques, fast software simulation for proven components, capable of running the real embedded software application without any change.
To fully simulate a complete hardware platform, one must simulate the processors and co-processors, together with the peripherals such as network controllers, graphics controllers, USB controllers, etc. A commonly used solution is the combination of some ISS (Instruction Set Simulator) connected to a Hardware Description Language (HDL) simulator, in a co-simulation environment such as [12] , [13] . Some communication and synchronization must be designed and maintained between the two using some inter-process communication (IPC), which slows down the process.
The idea we pursue is to combine hardware modeling and fast simulation into a fully integrated, software based simulation environment, which uses a single simulation loop thanks to Transaction Level Modeling (TLM) [3] combined with a new ISS technology designed specifically to fit within the TLM environment.
The most challenging way to enhance simulation speed is to simulate the processors. Processor simulation is achieved with Instruction Set Simulation (ISS). There are several alternatives to achieve such simulation. In interpretive simulation, each instruction of the target program is fetched from memory, decoded, and executed. This method is flexible and easy to implement, but the simulation speed is slow as it wastes a lot of time in decoding. Interpretive simulation is used in Simplescalar [2] . Another technique to implement a fast ISS is dynamic translation [8] , [4] which has been favored by many implementors [18] , [19] , [20] , [14] in the past decade.
There are many ways of translating binary code into cached data, which each come at a price, with different trade-offs between the translation time and the obtained speed up on cache execution. Also, simulation speed-ups usually don't come for free: most of time there is a trade-off between accuracy and speed. There are two well known variants of the dynamic translation technology: the target code is translated either directly into machine code for the simulation host, or into an intermediate representation, independent from the host machine, that makes it possible to execute the code with faster speed. A challenge in the development of high performance simulators is to maintain simultaneously fast speed and simulation accuracy. In the Tempo project, we expect to develop a dynamic translation technology satisfying the following additional objectives:
-
provide different levels of translation with different degrees of accuracy so that users can choose between accurate and slow (for debugging) or less accurate but fast simulation.
-
to take advantage of multi-processor simulation hosts to parallelize the simulation;
-
to define intermediate representations of programs that optimize the simulation speed and possibly provide a more convenient format for studying properties of the simulated programs.
Another objective of the Tempo simulation is to extract information from the simulated applications in order to prove system properties. One can use model based tools to generate tests that can be run on the simulator to check whether the test fails or not on the real application. The project is considering an approach as illustrated in Figure 1
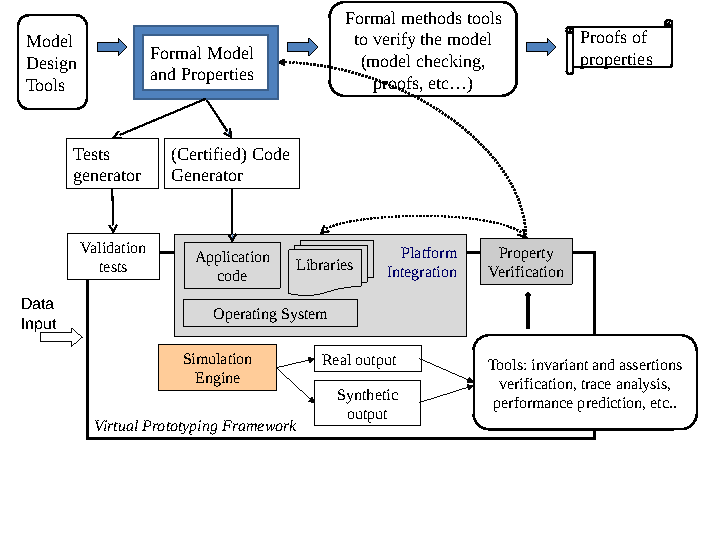
Thus, it is also a goal of Tempo activities to use such formal methods tools to detect failures, either by generating tests, or by using formal methods tools to analyze the results of simulation sessions.